




جميع المنتجات
الروبوت الصناعي ذراع



تفاصيل المنتج
منتوج وصف
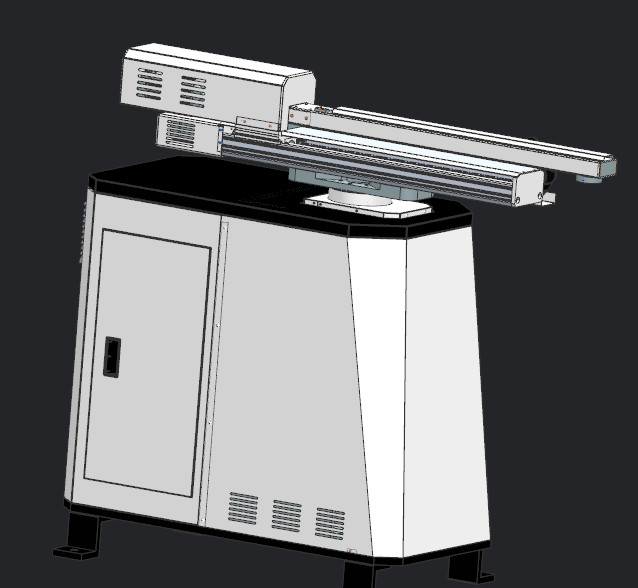
ذراع روبوت من نوع التأرجح للختم.
الوصف:
الاسم: روبوت صناعي ثلاثي المحاور الموديل: CP-V3-10-125
روبوت صناعي رباعي المحاور الموديل: CP-V4-10-125
روبوت صناعي خماسي المحاور الموديل: CP-V5-10-125
جميع المحاور مدفوعة بمحرك سيرفو ذي موضع مطلق.
المحور Y (المحور الصاعد والنازل) يستخدم دليل خطي عالي الدقة من تايوان بالإضافة إلى برغي رصاصي دقيق وسيرفو عالي الدقة، لتحقيق تحديد المواقع صعودًا وهبوطًا سلسًا وعالي السرعة وعالي الدقة.
المحور S (المحور الرئيسي للدوران) يستخدم تروس تخفيض مجوفة مخصصة للروبوت من اليابان بالإضافة إلى سيرفو عالي الدقة من تايوان لتحقيق تحديد المواقع عالي السرعة والدقة بدون فجوات.
المحور X (عمود التلسكوب الأمامي والخلفي) يستخدم دليل خطي عالي الدقة من تايوان بالإضافة إلى برغي رصاصي دقيق وسيرفو عالي الدقة، لتحقيق تحديد المواقع عالي الدقة وعالي السرعة.
جسم الروبوت مصنوع من الفولاذ الأسود عالي القوة. المحور الرئيسي للدوران مصنوع من ملف تعريف ألومنيوم عالي القوة. الغطاء مصنوع من الصفائح المعدنية مع ورنيش الخبز. يتميز بهيكل بسيط وقوة عالية ومظهر جميل ومتانة.
![]()
المعلمات: (التخصيص متاح)
1. أقصى حمولة: 10 كجم نصف القطر: 1250 مم
2. دقة تحديد المواقع المتكررة: ±0.1 مم
3. طريقة التركيب: نوع الأرضية
4. شوط المحور Y صعودًا وهبوطًا: 420 مم أقصى سرعة: 500 مم/ث
5. شوط دوران المحور S: +-270 درجة أقصى سرعة: 156 درجة/ث
6. شوط تقدم وتراجع المحور X: 600 مم أقصى سرعة: 1.56 م/ث
7. شوط دوران المحور X: 360 درجة أقصى سرعة: 360 درجة/ث
8. الوزن: 330 كجم البيئة: 0-45 درجة مئوية
9. الرطوبة النسبية: 30%~95% بدون تكثف
10. اللون: أساسي (أخرى متاحة)
![]()
نظام التحكم:
1. نظام التحكم في الروبوت الصناعي المخصص وضع التحكم من نقطة إلى نقطة PTP
2. وحدة تحكم محمولة بشاشة لمس ملونة مقاس 8 بوصات، واجهة مستخدم متعددة اللغات، سهلة التشغيل ومريحة وسهلة الاستخدام.
3. طرق التدريس المفتوحة، برمجة الروبوت أسهل وبديهية، بدون مهندسي PLC، يمكن للمستخدمين النهائيين أيضًا البرمجة في موقع الإنتاج.
4. دعم تخزين برنامج منتج متعدد للاتصال بأي مكبس ثقب، وظيفة التعشيق
5. يعتمد التنسيق بين الروبوتات المتعددة للمكبس المستمر على اتصال ناقل CAN. سرعة استجابة الذراع الآلية أسرع والكفاءة أعلى. يتطلب الاتصال البسيط عدم وجود اتصال إشارة إدخال/إخراج معقد
6. مع منفذ USB، يمكن استخدام قرص U لترقية البرنامج وإدارة المعلمات ومشاركتها.
7. يمكن ضبط موضع الذراع المتحركة بسرعة. يمكن تحريك ذراع الروبوت يدويًا إلى الموضع المستهدف، ثم ضبط الموقع الحالي كموضع التشغيل التلقائي. يمكن أيضًا استخدام أداة التشذيب النبضي من النوع المقبض لتحديد المواقع الدقيقة في هذه العملية، لذا فإن القيمة المحددة أكثر دقة وملاءمة.
8. أقصى طاقة: 2.50 كيلو واط صندوق التحكم الكهربائي: صندوق كهربائي مدمج
9. مع حامل قلادة تعليم متنقلة، طول الكابل 3 أمتار
10. فئة الحماية: IP20 الرطوبة: تصل إلى 95%، بدون تكثف
11. درجة الحرارة المحيطة 0 - 45 درجة مئوية
الطاقة: أحادي الطور بالإضافة إلى الأرضي، جهد 220 فولت
الخصائص
مع أربع درجات من الحرية، الدوران الأيسر والأيمن، صعودًا وهبوطًا، ذهابًا وإيابًا، دوران النهاية، لا يوجد متطلب لمركز ارتفاع القالب، التباعد. التخصيص غير القياسي متاح لتلبية الأحمال المختلفة وتمديد الذراع، وفقًا لمتطلبات العملاء.
1. جميع محركات السيرفو هي محركات سيرفو ذات موضع مطلق. لا حاجة لإعادة تحديد الأصل الميكانيكي بعد إيقاف التشغيل وإعادة التشغيل، ويمكن إعادة تحديد الأصل بسرعة وفقًا لذاكرة السيرفو. لا يوجد مفتاح مستشعر الأصل لتقليل معدل الفشل.
2. يستخدم المحور الرئيسي للدوران تروس تخفيض مجوفة عالية الدقة خاصة بالروبوت، مع ميزات مدمجة وجميلة وفولاذية قوية وعزم دوران ومقاومة للصدمات.
3. الميزة الرئيسية لهذا النموذج هي دوران العمود الدوار. الهيكل صاعد ونازل أولاً ثم يدور بعد ذلك. يتم تحريك مركز الثقل بالقرب من مركز الدوران للحصول على سرعة ودقة دوران أفضل.
4. يستخدم الدوران الأفقي والقلب صعودًا وهبوطًا للمحطة آلية قيادة اقتران الروبوت. يتم وضع محركي القيادة في الخلف وثابتين نسبيًا، وبالتالي تحسين استقرار الجهاز وقدرة تحميل النهاية بشكل كبير.
5. مجهزة بوحدة توصيل مختلطة، يمكن توصيل مجموعات متعددة للعمل معًا ويمكن تقسيم الخط بأكمله إلى عدة أقسام صغيرة للتشغيل.
6. نظرًا لوحدة التوصيل المختلطة، يمكن للذراع أن تتحرك بحرية، كما أن التشغيل المختلط بين الإنسان والآلة متاح أيضًا، وهو أمر مريح لترتيب الموظفين للعمل في الأماكن غير المناسبة للذراع.
7. مجهزة بنظام برمجة ذكي، سهل التعلم. في كل مرة يتم فيها تغيير القالب، لا تستغرق إعادة البرمجة سوى خمس دقائق.
8. يساعد التصميم المتكامل للصندوق الكهربائي والمضيف على شغل الذراع لمساحة أقل وهو أكثر ملاءمة للتركيب وإعادة التموضع. ذراع روبوت الختم أكثر كفاءة وسهولة في الاستخدام من أي علامة تجارية لروبوت سداسي المحاور للأغراض العامة. أيضًا، إنه أفضل من حيث الدقة وعمر الخدمة والسرعة وسهولة الاستخدام من أذرع الوظائف الأخرى نفسها.
يتم توفير حلول وخدمات ما بعد البيع المصممة خصيصًا للعملاء لحل جميع أنواع المشكلات لضمان تكيف الروبوت مع مجموعة متنوعة من بيئات العمل.
![]()
المنتجات الموصى بها